Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
視覚障害者のためのナビゲーションロボットの開発 - y
貫山(貫神参拝)
移動体用の撮影画像による前方路面の摩擦係数推定システム
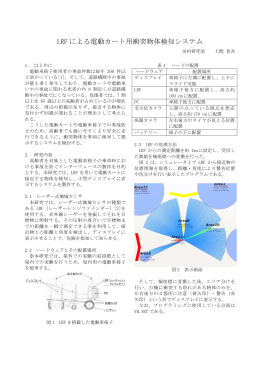
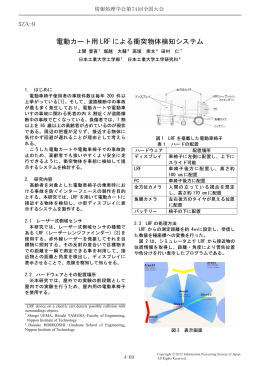
電動カート用 LRF による衝突物体検知システム
E-9 - 日本大学理工学部
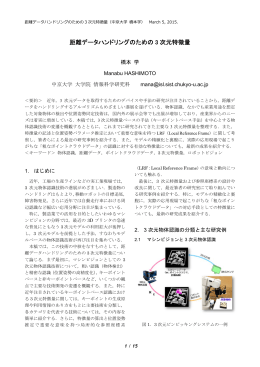
距離データハンドリングのための 3 次元特徴量 - 橋本研究室