Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ハードウェアデバッグの方法
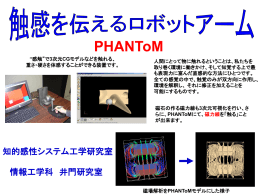
触感を伝えるロボットアーム
[ 東京工業大学 2009 年 第1類特別入試 1 ] 1( ) sin f x x = 2, 3, 4, n
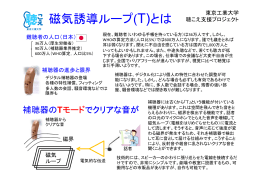
ループの説明パンフレット(pdf:391k) - 中村・田原研究室
![[ 東京工業大学 2009 年 第1類特別入試 1 ] 1( ) sin f x x = 2, 3, 4, n](http://s1.slideshowjp.com/store/data/000190926_1-35389e9113b03ff7bea366ca9ac499a6-260x520.png)