Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
デッドレコニングに基づく自動運転車両のラテラル制御
目標点数
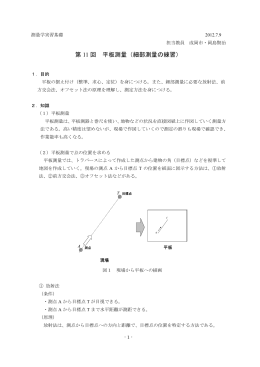
第 11 回 平板測量(細部測量の練習) - yy-project/el
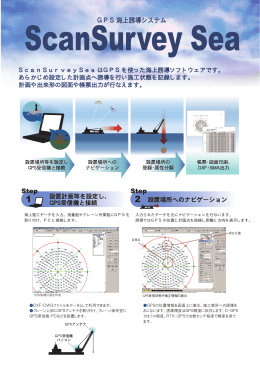
GPS海上誘導システム
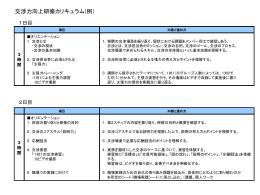
⑮交渉力向上カリキュラム
sin 3 ∙ × XVE
明治学院大学機関リポジトリ http://repository.meijigakuin.ac.jp/