Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
村田 真悟君 - 情報処理学会
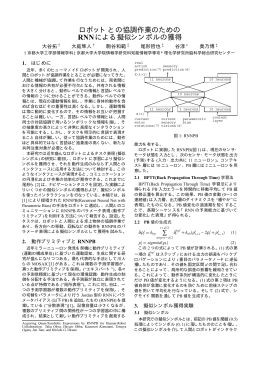
ロボットとの協調作業のための RNNによる擬似シンボルの獲得