Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
人型ロボットによるモーション・フォース制御における 足部の接触条件を
ジャスティン プラス 1.2L - CLUB T-fal
離団(別行動) 確認書 - アールアンドシーツアーズ旅行会社様専用サイト
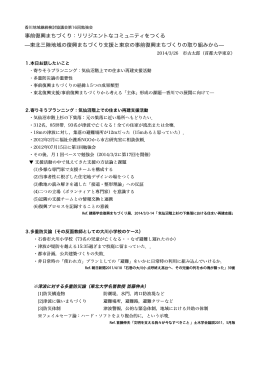
講義資料
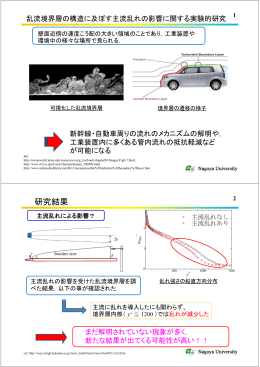
乱流境界層の構造に及ぼす主流乱れの影響
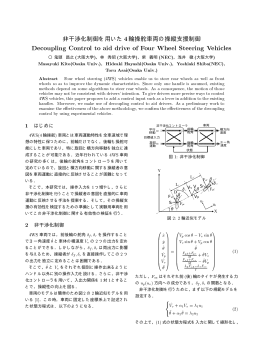
非干渉化制御を用いた4輪操舵車両の操縦支援制御
ppt