Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
修士論文 被案内者からの力を考慮した 杖型案内ロボット
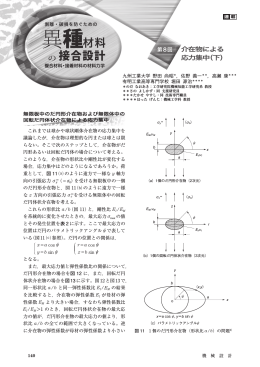
介在物による 応力集中(下)
数学 II 演習 2008 年 11 月 26 日担当:寺杣友秀 1. R2 から R3 への
PTAMM を用いた移動物体追跡手法 TP14020 早川 壮 指導教授:岩堀