Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ロボットアームのマスタースレイブ 制御について
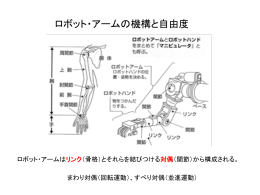
ロボット・アームの機構と自由度
希望卒業研究テーマ
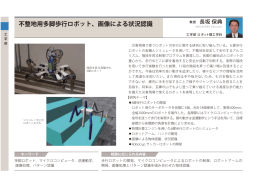
不整地用多脚歩行ロボット、画像による状況認識
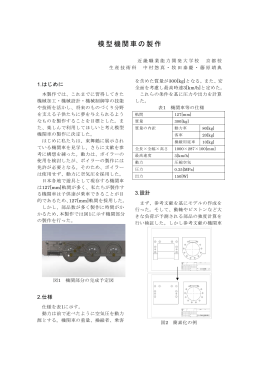
模型機関車の製作
救命ボート用の簡易登はん器(ABUMI)の考案 について
希望卒業研究テーマ
制限時間内に荷物を決められた場所に運び上げ、得点を競うゲーム
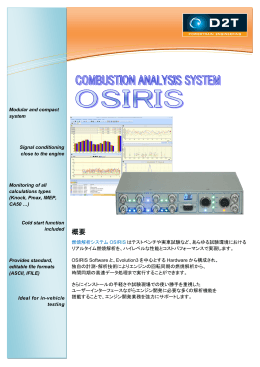
概要 - 東京プラント株式会社
キャッチハンター貸渡約款
シーン進行編