Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
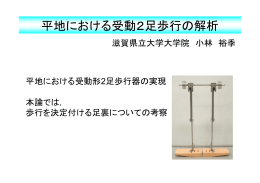
平成19年度 S4図形処理 課題2(3次元座標変換)
基礎編サンプル
LPDA型光電界センサにおける指向性の検討
非線型非対称横揺れについての一計算
図形処理 課題2 「3次元でのモデリング・座標変換
スライド タイトルなし
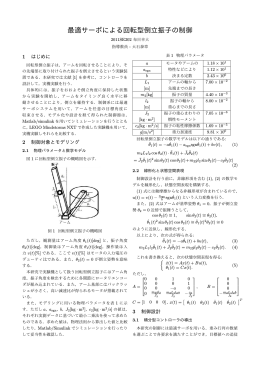
最適サーボによる回転型倒立振子の制御
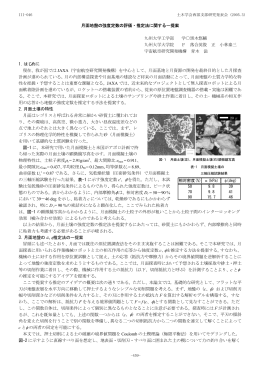
土木学会西部支部研究発表会 (2005.3)
C - 東北大学 流体科学研究所
傘回しロボットの開発 (kasa)
モデルの切替によるツインロータヘリコプタの制御性能の向上
3 自由度 2 足スケーティングロボットの揺動を利用 した片足滑走の研究
視覚誤差にロバストな回転ジョイントのパラメタ推定