Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
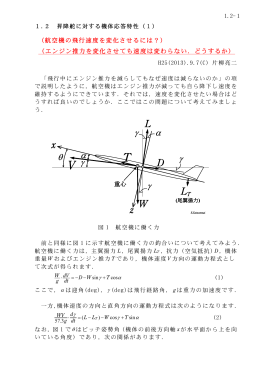
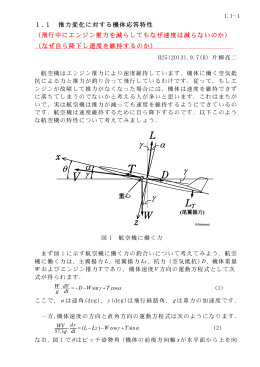
1.4 昇降舵に対する機体応答特性(2).Y130907A
数学 II 演習 2008 年 11 月 26 日担当:寺杣友秀 1. R2 から R3 への
(1).Y130907C
Document
T - nifty
正素数角形の任意の 3 本の対角線は 頂点以外の 1 点で交わら - tcp-ip
Document
二輪車の車線追従制御系の設計
代幾 I 演習 (2008/04/17)
Document
最適サーボによる回転型倒立振子の制御
研究成果報告書 - KAKEN - 科学研究費助成事業データベース
2 足スケーティングロボットの重心移動を利用した 片足滑走動作の研究