Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
曲線足裏断面形状を持つロボットのメモリ・ベースト制御による 二足歩行
sin 3 ∙ × XVE
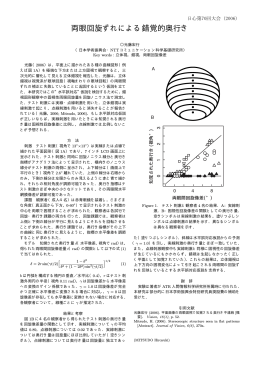
両眼回旋ずれによる錯覚的奥行き
エレクトロニクスのための数理 Ⅰおよび演習 三角比(復習) なぜSIN
2013年度 第4回演習(40 KB)
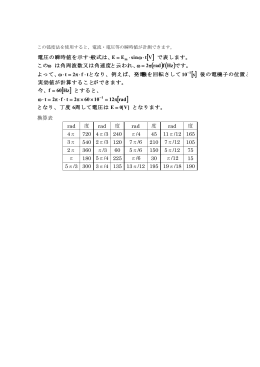
となります。 周して電圧は となり、丁度 とすると、 今、 ができます。 実効
Condition::コンディションという日本語もあるが 「状態」と
時空特異性と物理学 - 大阪大学素粒子論研究室