Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
不整地走行機構を有する移動ロボットの自律走行の実現
3.クリッカーの教育利用
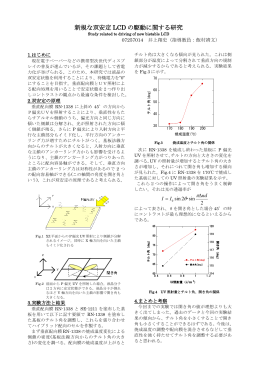
新規な双安定LCDの駆動に関する研究 (B4 井上 翔史)
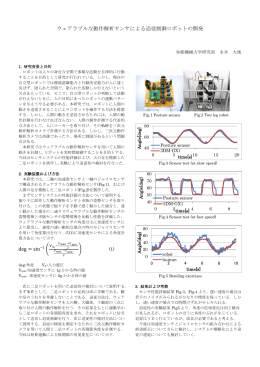
ウェアラブルな動作解析センサによる追従制御ロボットの開発 deg = sin−1