Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
実行可能 UML を用いた自律走行車両型ロボットによる 荷物自動搬送
【ご案内】新情報システム学体系化研究・第 7 回講演会の開催
徳本晋さんへのインタビュー
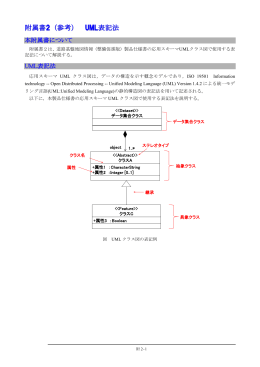
附属書2(参考) UML表記法
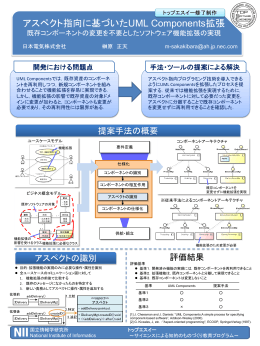
アスペクト指向に基づいたUML Components拡張
シラバス - fc2
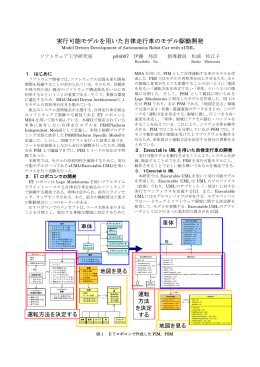
実行可能モデルを用いた自律走行車のモデル駆動開発