Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
慣性ロータを用いた受動車輪型二足ロボットの倒立制御
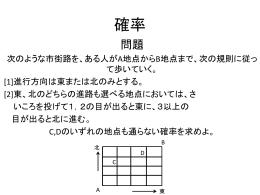
確率3
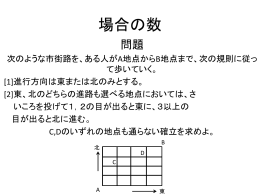
場合の数7
pptxファイル/5.62MB
Document
リニアコライダー実験用細分割電磁カロリメータの 応答一様性の評価 2
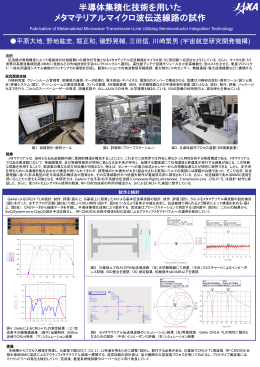
スライド 1 - ISAS
連続時間型ΔΣ変調器におけるクロックジッタの影響を低減する
無人ヘリコプター散布での農薬飛散ばく露評価