Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
PDF - KAKEN - 科学研究費助成事業データベース
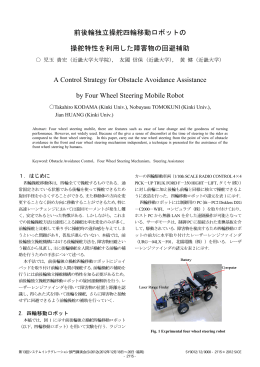
前後輪独立操舵四輪移動ロボットの 操舵特性を利用した障害
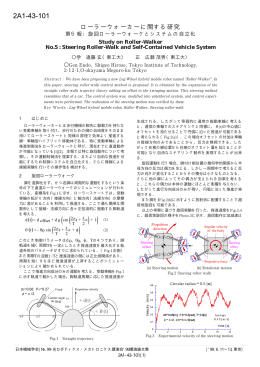
2A1-43-101 ローラーウォーカーに関する研究
6. 5 観光客用マップ (551KB / PDF)