Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
TOSHIBA C2MOS ver6 1984/09
Document
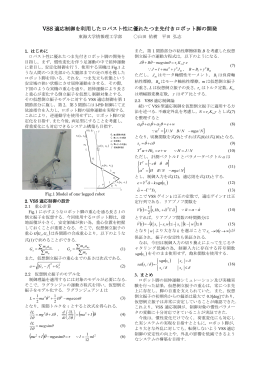
1 脚ロボットの屈伸動作における安定化制御に関する研究 [ ] ( )s
平成 26 年度インフラシステム輸出促進調査等事業
![1 脚ロボットの屈伸動作における安定化制御に関する研究 [ ] ( )s](http://s1.slideshowjp.com/store/data/000232262_1-8148ca94a88482504206db31b06a13f7-260x520.png)