Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
c - 宇野研究室
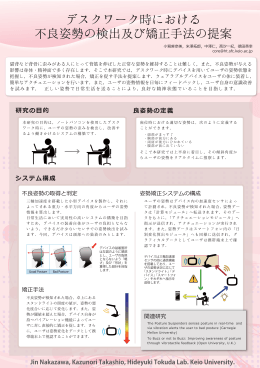
研究の 的 良姿勢の定義 システム構成 Jin
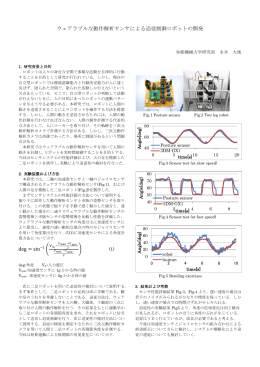
ウェアラブルな動作解析センサによる追従制御ロボットの開発 deg = sin−1