Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
µ λ θ θ = θ
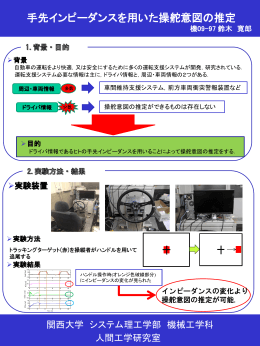
手先インピーダンスを用いた操舵意図の推定(M0鈴木)
sin 3 ∙ × XVE
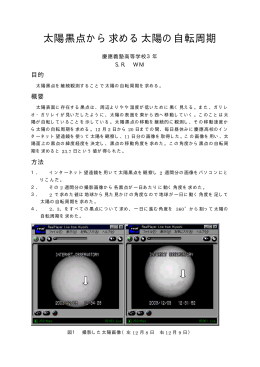
15. 「太陽黒点から求める太陽の自転周期」
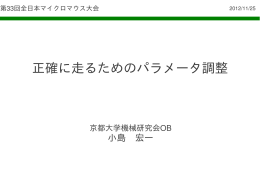
正確に走るためのパラメータ調整
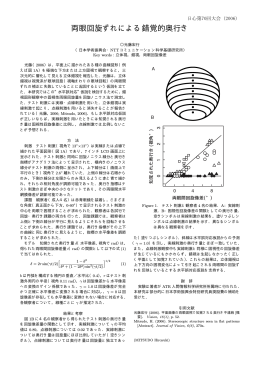
両眼回旋ずれによる錯覚的奥行き
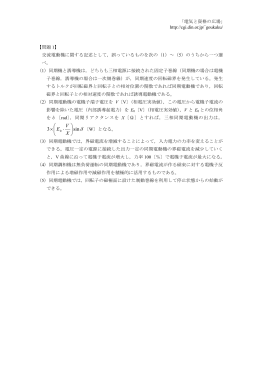
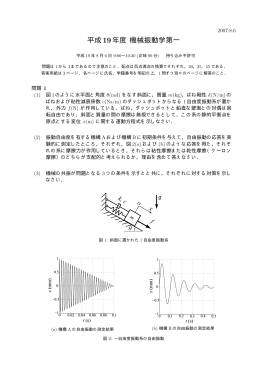
平成19年度 機械振動学第一
エレクトロニクスのための数理 Ⅰおよび演習 三角比(復習) なぜSIN
問題 解答例 補足
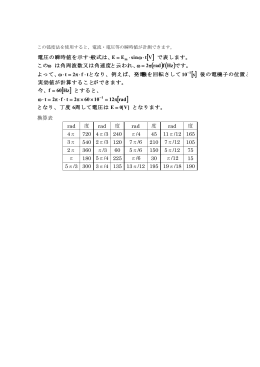
となります。 周して電圧は となり、丁度 とすると、 今、 ができます。 実効
熊本大学学術リポジトリ Kumamoto University Repository System
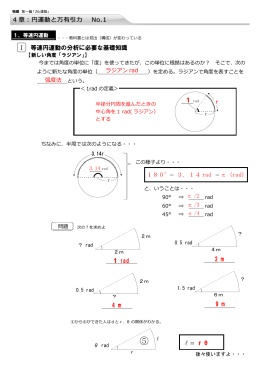
記入済 - 基礎からの高校物理
演習問題解答