Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
四足歩行ロボットの制御~旋回
四足歩行ロボットの 製作と制御
003b1
中村 泰, 吉川 雄一郎, 石黒 浩 大阪大学 石黒研究室
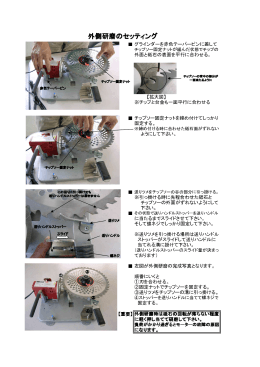
外側研磨のセッティング
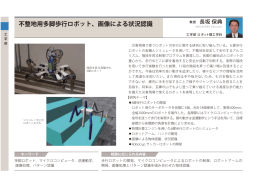
不整地用多脚歩行ロボット、画像による状況認識
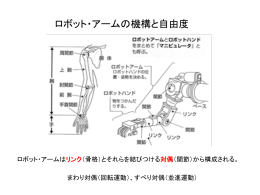
ロボット・アームの機構と自由度
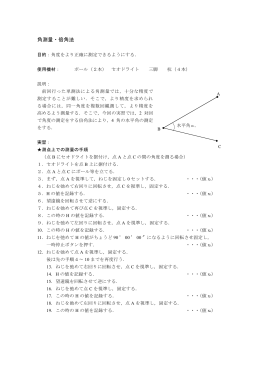
角測量・倍角法 - Biglobe