Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ヒューマン−ロボット・インタラクションにおける 理想的な相互適応を目指して
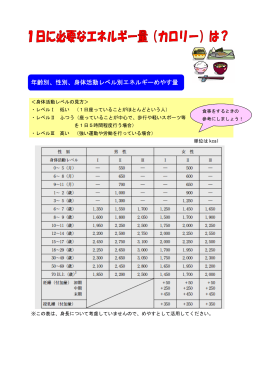
年齢別、性別、身体活動レベル別エネルギーめやす量
ポンプ軸受け部の管理[PPT]
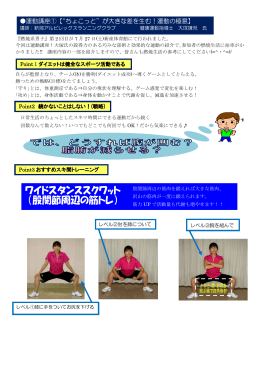
運動講座 その1
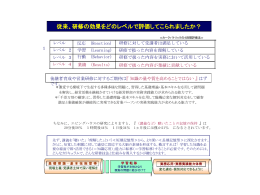
従来、研修の効果をどのレベルで評価してこられましたか?
![ポンプ軸受け部の管理[PPT]](http://s1.slideshowjp.com/store/data/000000280_1-05bf8fa63d0d4c963cd99a6b71f9f6e2-260x520.png)