Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
実走時におけるペダリングスキル及び脚出力測定器の開発実施報告書
スリップ率に基づく車輪型ロボットの 段差昇降動作向上のための制御
東北地方太平洋沖地震におけるハートグループの取組み
反射材事業部取材記事 - 株式会社ニューソニック
蒼山日菜xDJ高杉二郎震災復興支援
連続繊維シートを応用した 自昇降式コンクリート柱補修装置の
PDF
Document
神田 崇行 ロボットによる街角の情報環境の構築 §1.研究実施の概要 §2
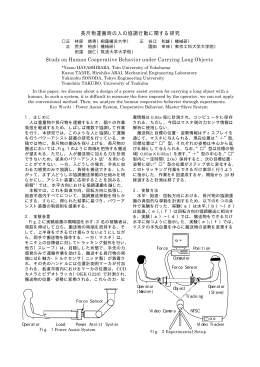
長尺物運搬時の人の協調行動に関する研究 Study on Human
日本でのアジャイル開発を促進する 「Force.com」と
合衆国特許判例法研究(米国特許実務大系判例抜粋集から) 2007 年 6
力の学習を支援する力表示器 - 宇都宮大学 学術情報リポジトリ(UU-AIR)