Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
PowerPoint
赤外線センサを用いた回路の 設計及びそのシミュレーション
PowerPoint
二足歩行ロボットKHR-2HVの改良と無線化
PowerPoint
電子線照射用試料(β-LiGa) の育成とその電気的特性の測定
2足歩行ロボットの製作と歩行用プログラムの作成
創作ゼミナールⅠ テーマ計画書
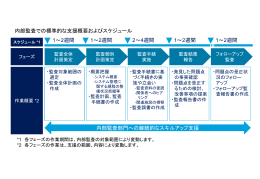
内部監査での標準的な支援概要およびスケジュール 1~2週間
「創作ゼミナールⅡ」成果発表 要約
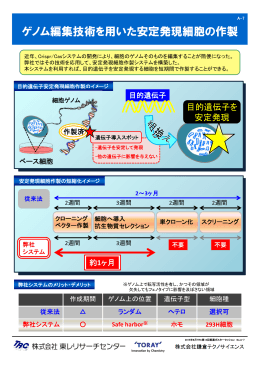
ゲノム編集技術を用いた安定発現細胞の作製
LabVIEWによる計測データの処理プログラムの作成
到達目標 1. チームの一員として協働できる。 2. 療養上の援助が適切に
二足歩行ロボットの 設計及び製作
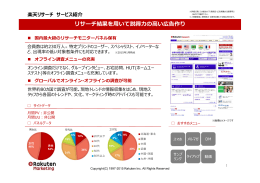
リサーチ結果を いて説得 の高い広告作り イメージ画像未入稿
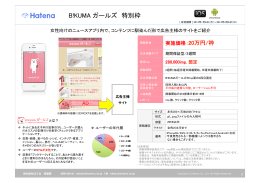
B!KUMA ガールズ 特別枠
【つくばの景観】パワーポイント
ウドの組織培養による大量増殖
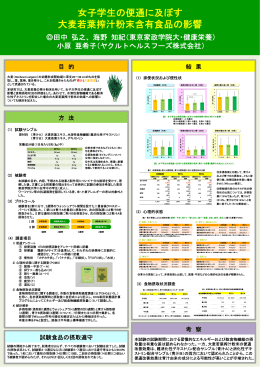
女子学生の便通に及ぼす 大麦若葉搾汁粉末含有食品の影響
2014年訪ロ研修参加者募集のお知らせを受取りました
Page 1 ※本企画書における、構成案 / レイアウト案等を 含む、一切の
PowerPoint
CHAPTER1