Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
二足歩行ロボットの設計及び制作
PowerPoint
CADを用いた自走ロボットの設計・製作および 走行プログラムの開発
PowerPoint
〔多摩地域の森林特性を踏まえた集材作業の効率化に関する研究
アームを有する移動ロボットの設計・製作
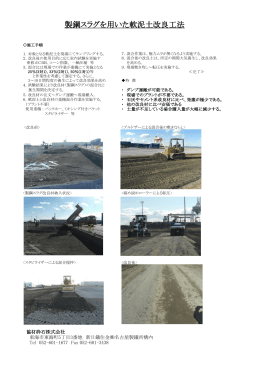
製鋼スラグを用いた軟泥土改良工法
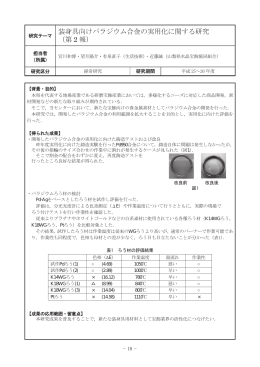
装身具向けパラジウム合金の実用化に関する研究 (第 2 報)
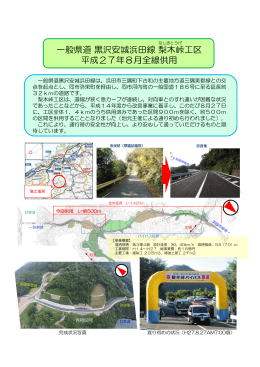
一般県道黒沢安城浜田線梨木峠工区 平成27年8月全線供用
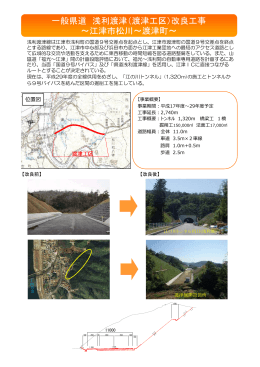
一般県道 浅利渡津(渡津工区)改良工事 ∼江津市松川∼渡津町∼
道づくりだより第92号(2015.10)
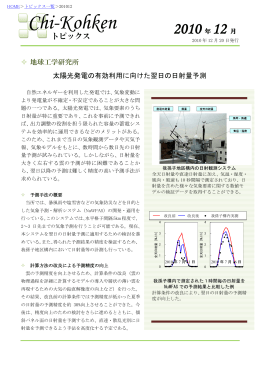
太陽光発電の有効利用に向けた翌日の日射量予測
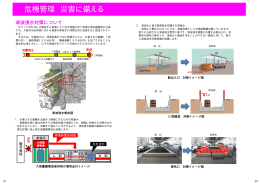
危機管理 災害に備える