Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
Powerpoint
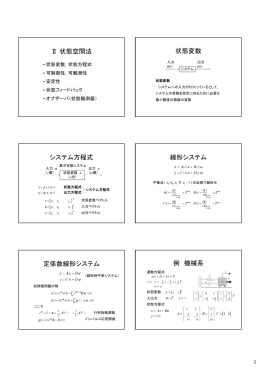
Ⅱ 状態空間法 状態変数 システム方程式 線形システム 定係数線形
Powerpoint
Pdf版 (2up) - システム制御理論研究室
オブザーバを用いた状態フィードバック制御の概念 を理解しよう 併合
講義資料
鉄/非鉄金属識別 近接センサ