Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
システム制御基礎論
Powerpoint
Pdf版 (2up) - システム制御理論研究室
Powerpoint
Ⅱ 状態空間法 状態変数 システム方程式 線形システム 定係数線形
クッキーと追跡の拒否
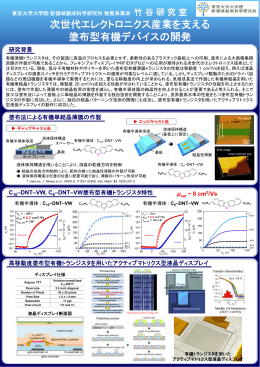
次世代エレクトロニクス産業を支える 塗布型有機デバイスの開発
ビューシリコン表紙⑧