Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
振動モードを利用した長方形 FPD ガラスの非接触割断加工
振動モードの切替えによる斜張橋斜材ケーブルの制振
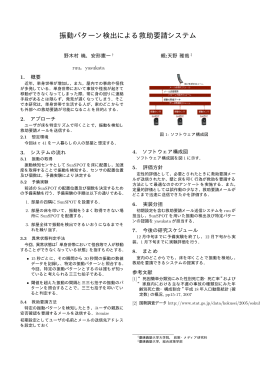
振動パターン検出による救助要請システム
振動データ時系列処理のプログラム TimeProcess 説明書
振動タイヤローラ
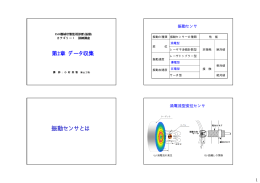
振動センサとは
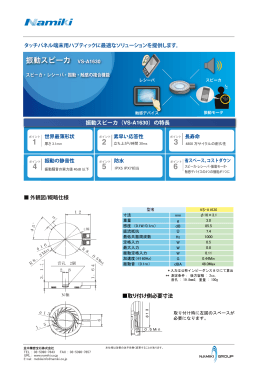
振動スピーカ VS-A1630
振動スクリーン
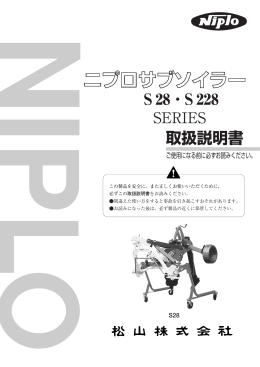
振動サブソイラー S28/S228
振動インテンシティによる散逸エネルギの解析
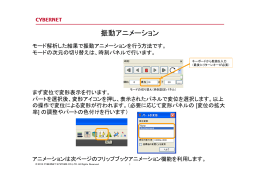
振動アニメーション
振動アクチュエータを用いた物体のなぞり感覚呈示のための 振動波形
振動を利用した移動機構の研究
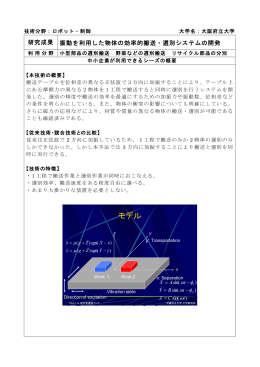
振動を利用した物体の効率的搬送・選別システムの開発
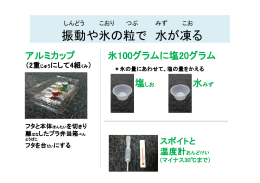
振動や氷の粒で 水が凍る
振動の防止の方法変更届出書 豊 橋 市 長 殿 振動規制法第8条第1項の
振動の防止の方法変更届出書 様式第4
振動の防止の方法変更届出書
振動の話(設備診断)
振動の理論
振動の測定・解折についての一考察(PDF:692KB)
«
prev
1 ...
32006
32007
32008
32009
32010
32011
32012
32013
32014
... 101216
»
next