Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
2715 - 真岡ロータリークラブ
271210 よろずセミナーパンフレット(講師:久米先生)
271124 報道資料(プロ野球2015ドラフト指名選手が市長表敬訪問)
271110 報道資料(柏市酒井根・中原地区の防犯ボックス開所式を開催)
271110 報道資料(ゴールデンホークス表敬訪問)(PDF形式 173
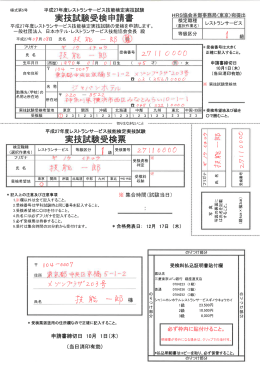
27110000 孝え弁絶 一炭⇒ 芋丈能 - 社団法人・日本ホテル・レストラン
2711 meiga - 埼玉県県民活動総合センター
2711 - マキタ
2710本社会場 [更新済み]
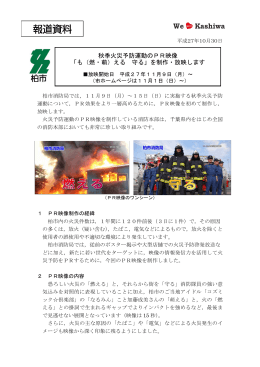
271030 報道資料(火災予防運動PR映像)(PDF形式 229
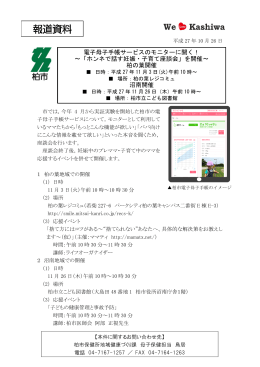
271026 報道資料(「ホンネで話す妊娠・子育て座談会」を開催
271016株式会社伴戸商店_一般 - 京都ジョブナビ
271014「木造建築推進セミナー」チラシ
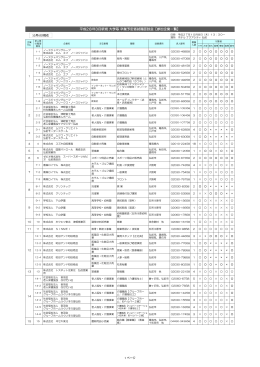
271008弘前 大卒等面談会 企業一覧(0928)
271-283
271 淀 150 淀川フォーラム実行委員会 NPO 等 中間とりまとめに対 する
271 新公益法人制度の活用法 ~パート1 公益法人と新制度の概要
271 強直性脊椎炎 基本情報 氏名 姓(漢字) 名(漢字) 姓(かな) 名(かな
271 強直性脊椎炎
271
271
«
prev
1 ...
44148
44149
44150
44151
44152
44153
44154
44155
44156
... 101216
»
next



![2710本社会場 [更新済み]](http://s1.slideshowjp.com/store/data/001187226_1-4a7cf4b6144f60121b3c650bc0755741-260x520.png)