Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
26 大山祭り
26 夏休み自由研究チラシ
26 境港市観光協会
26 塩見
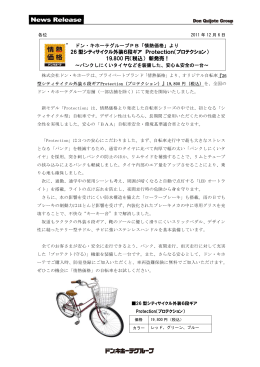
26 型シティサイクル外装6段ギア Protection
26 国府中学校 (PDF : 91KB)
26 回ふれあいトーク (高岡流おもてなし PartⅤ~食によるおもてなし
26 号 第3回やどかりの里の原点を学ぶ学習会 やどかり研究所主催
26 内藤.indd
26 六中学校だより1月号
26 公大協第 33 号 平成 26 年 6 月 10 日 名桜大学長 山里 勝己 様
26 保発0212第11号
26 佐伯さんの京やさいセット 3. 2. 1.
26 仲村 真一 仲村 かおり 30 丸山 里幸 知念 清乃
26 介護保険のお知らせ 乳がん・子宮頸がん・ 大腸がん無料
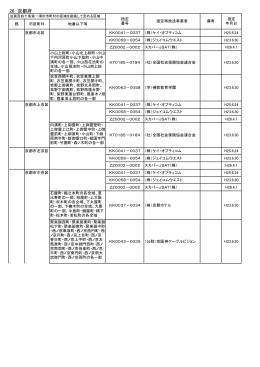
26 京都府 - 医療機関の医療情報センター
26 京都府
26 京 都 府
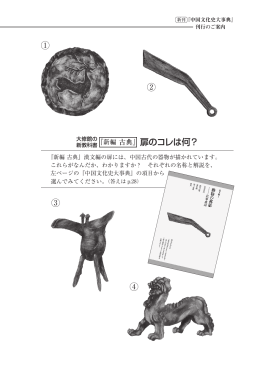
26 中国文化史大事典
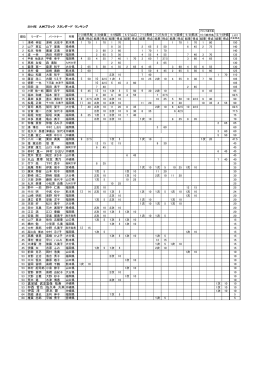
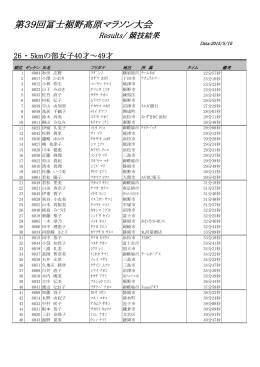
26 ・ 5kmの部女子40才~49才
26 ライフル射撃
«
prev
1 ...
44207
44208
44209
44210
44211
44212
44213
44214
44215
... 101216
»
next