Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
Σ0 p y0 x0 p0 Σ1 xy Σ2 xy p1 Σ0 y0 x0 p0 Σ1 xy
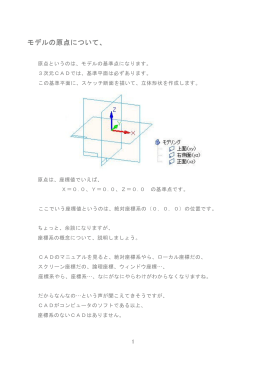
モデルの原点について、
橡 kakei2 - 日本神経回路学会
Document
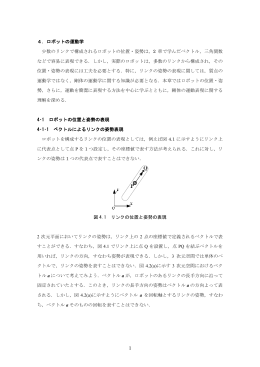
4.ロボットの運動学 少数のリンクで構成されるロボットの位置・姿勢は,2