Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
第 2 回 学籍番号 氏名
Document
高エネルギー加速器研究機構 大型シミュレーション研究 07
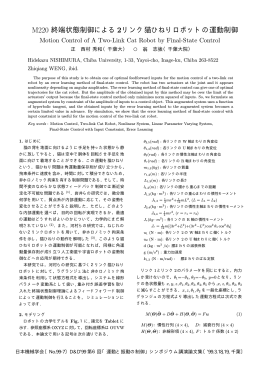
M220 終端状態制御による2リンク猫ひねりロボットの