Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
M220 終端状態制御による2リンク猫ひねりロボットの
sin 3 ∙ × XVE
問題 解答例 補足
ρ λ ρ λ ρ は π λ λ λ
力学Ⅱ レポート問題 第4回目
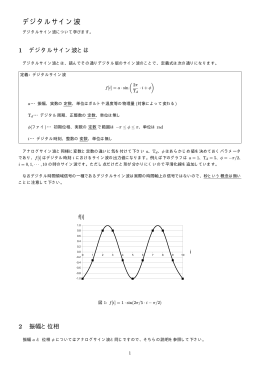
デジタルサイン波
第 2 回 学籍番号 氏名
非ホロノミックロボットの誤差学習による終端状態制御