Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
先端質量の変動に対する フレキシブルロボットアームの振動制御
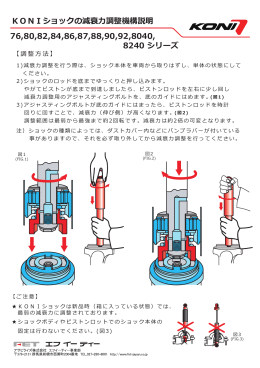
KONIショックの減衰力調整機構説明(76,80シリーズ等)
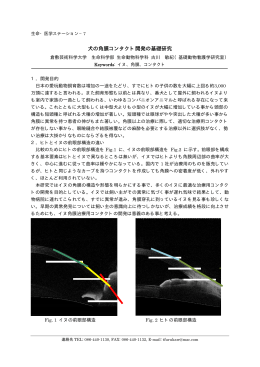
犬の角膜コンタクト開発の基礎研究
2組の3軸加速度センサを用いたモーションセンサシステムの開発
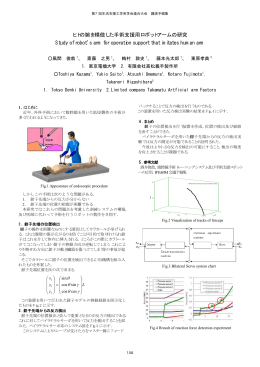
ヒトの腕を模倣した手術支援用ロボットアームの研究 Study of robot s
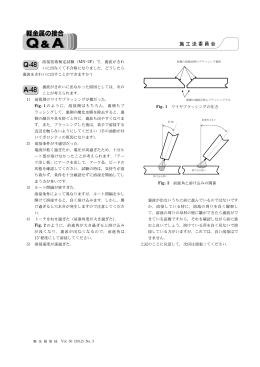
Fig. 1 ワイヤブラッシングの仕方 Fig. 2 前進角と溶け込みの関係 溶接
高エネルギー加速器研究機構 大型シミュレーション研究 07