Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ヒトの腕を模倣した手術支援用ロボットアームの研究 Study of robot s
高エネルギー加速器研究機構 大型シミュレーション研究 07
物理シミュレーションによる多関節アームロボットのロバスト
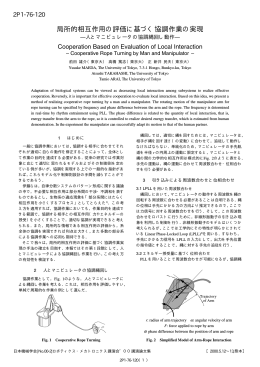
局所的相互作用の評価に基づく協調作業の実現
186
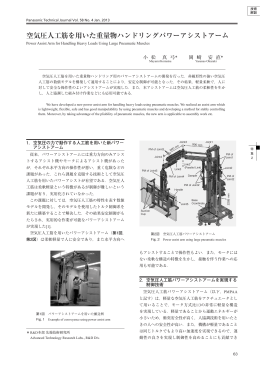
空気圧人工筋を用いた重量物ハンドリングパワーアシスト
体性感覚性注視運動における両眼視と上肢位置忍覚の統合
鉛直加振を受ける先端質量を持つ梁の非線形応答解析
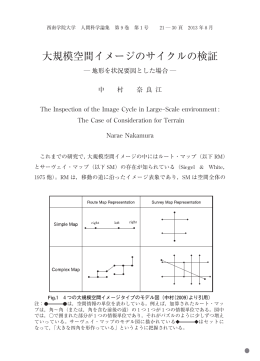
大規模空間イメージのサイクルの検証
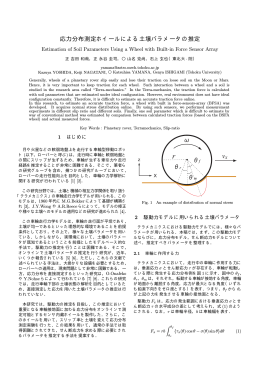
応力分布測定ホイールによる土壌パラメータの推定 ǰm ȁ ǰf ǰr
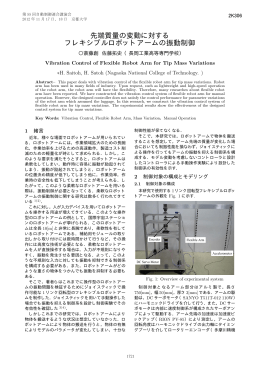
先端質量の変動に対する フレキシブルロボットアームの振動制御
物理パラメータ推定に基づく シリアル2リンク2慣性系の外乱推定型状態
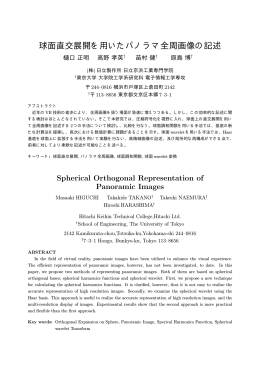
球面直交展開を用いたパノラマ全周画像の記述