Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
実験的アプローチによる軟弱地盤走行ロボットのための駆動力発生
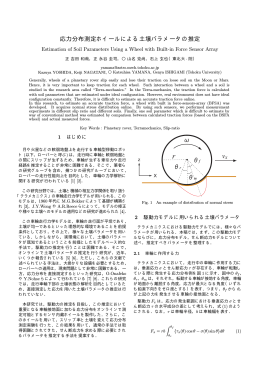
応力分布測定ホイールによる土壌パラメータの推定 ǰm ȁ ǰf ǰr
スリップ率制御を用いた車輪型ロボットの段差越えの実現
6. 5 観光客用マップ (551KB / PDF)
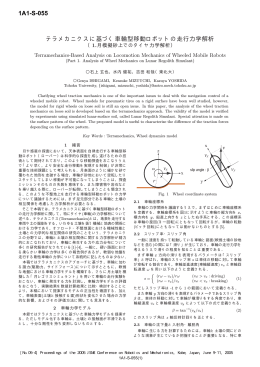
テラメカニクスに基づく車輪型移動ロボットの走行
月・惑星探査ローバーのステアリング 特性に基づく