Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
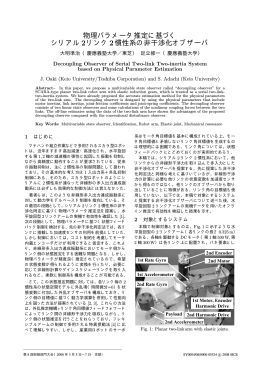
物理パラメータ推定に基づく シリアル2リンク2慣性系の外乱推定型状態
物理パラメータ推定に基づく シリアル2リンク2慣性系の
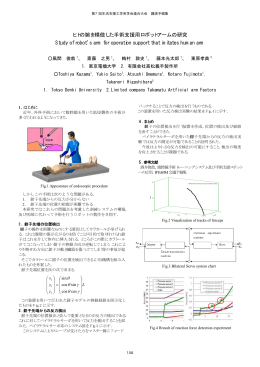
ヒトの腕を模倣した手術支援用ロボットアームの研究 Study of robot s