Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
形成 "!#$%`&)( II-88
Document
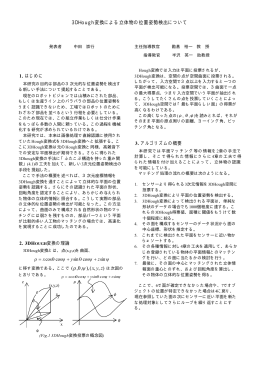
3 D H o u g h 変換による立体物の位置姿勢検出について zyx ψθρ
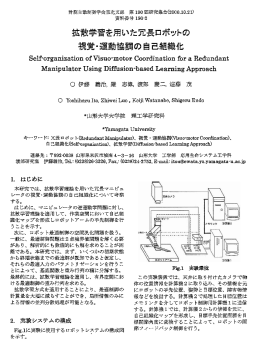
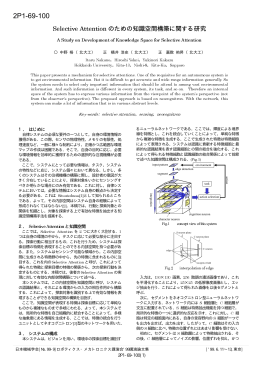
拡散学習を用いた冗長ロボッ卜の 視覚・運動協調の自己組織化
高エネルギー加速器研究機構 大型シミュレーション研究 07
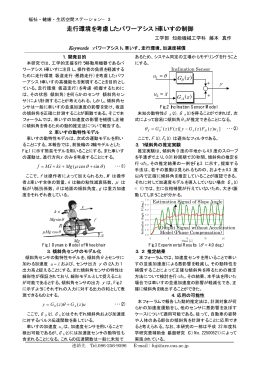
走行環境を考慮したパワーアシスト車いすの制御
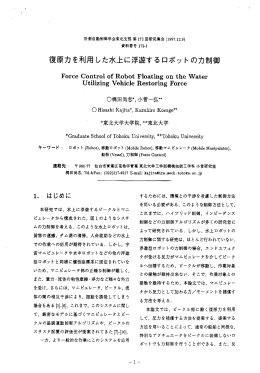
復原力を利用した水上に浮遊するロボットの力制御
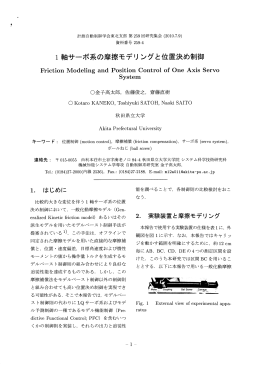
ー車田サーバ系の摩擦モデリ ングと位置決め制御
エージェント指向による CO 2 ガスの潮流内溶解・浮上に関する研究
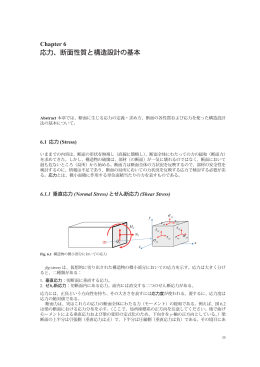
応力、断面性質と構造設計の基本
2P1-69-100
振動解析とソフトコンピューティングによる橋梁損傷
見る/開く - 琉球大学