Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
3 D H o u g h 変換による立体物の位置姿勢検出について zyx ψθρ
Document
拡散学習を用いた冗長ロボッ卜の 視覚・運動協調の自己組織化
高エネルギー加速器研究機構 大型シミュレーション研究 07
走行環境を考慮したパワーアシスト車いすの制御
形成 "!#$%`&)( II-88
光の干渉
見る/開く - 琉球大学
亜熱帯フロントの二層モデル
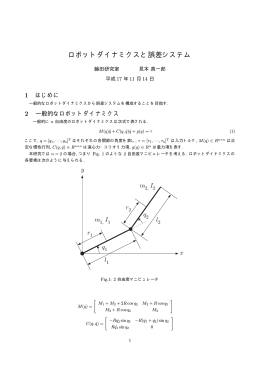
ロボットダイナミクスと誤差システム
自動車エンジンの空燃比制御に関する研究
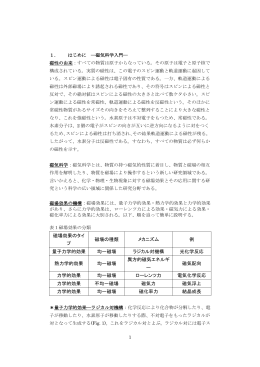
磁場効果のタイ プ 磁場の種類 メカニズム 例 量子力学的効果 均一磁場
復原力を利用した水上に浮遊するロボットの力制御