Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
冗長自由度を有する脚式ロボットの 実用的な接触力制御手法とバランス
KONIショックの減衰力調整機構説明(76,80シリーズ等)
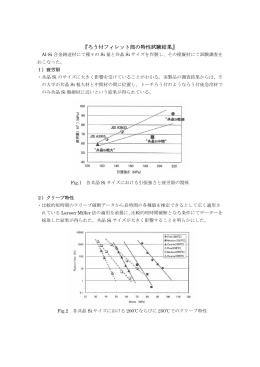
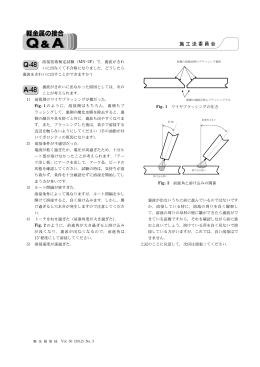
『ろう付フィレット部の特性試験結果』
FSWの終端部に残る穴は、問題はないのでしょうか?また
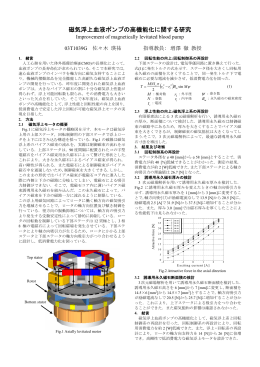
磁気浮上血液ポンプの高機能化に関する研究
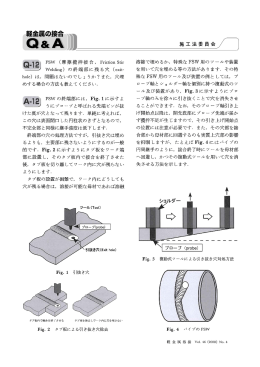
Fig. 1 ワイヤブラッシングの仕方 Fig. 2 前進角と溶け込みの関係 溶接
高エネルギー加速器研究機構 大型シミュレーション研究 07
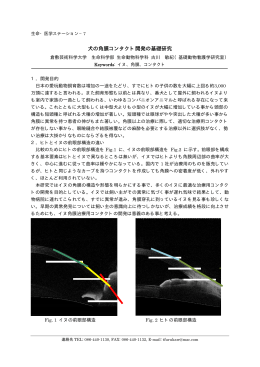
犬の角膜コンタクト開発の基礎研究
応答性vs出力周期
pdf "抽象"
PDF File