Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ロボットの自律移動機能と音環境理解
ダウンロード - 青山学院大学学生フォーミュラプロジェクト
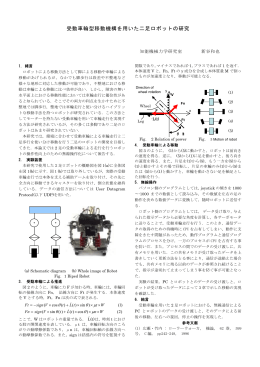
防衛用ロボット操縦のための身体動作認識技術
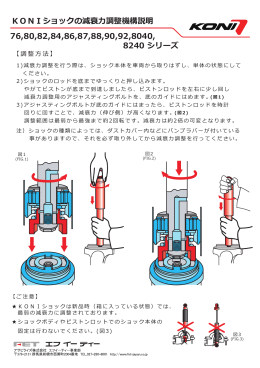
KONIショックの減衰力調整機構説明(76,80シリーズ等)
開発者 京都市出身、大阪市在住。 今回にて電王トーナメント出場3回目
予稿集 p.96-97
予稿集 p.107-108
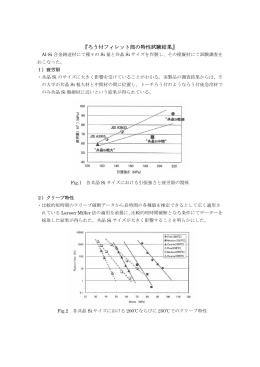
『ろう付フィレット部の特性試験結果』
Document
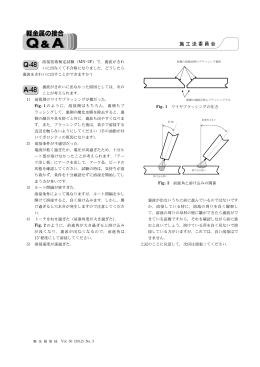
Fig. 1 ワイヤブラッシングの仕方 Fig. 2 前進角と溶け込みの関係 溶接
高エネルギー加速器研究機構 大型シミュレーション研究 07