Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ロボットダイナミクスと誤差システム
Document
数学 II 演習 2008 年 11 月 26 日担当:寺杣友秀 1. R2 から R3 への
光の干渉
3 D H o u g h 変換による立体物の位置姿勢検出について zyx ψθρ
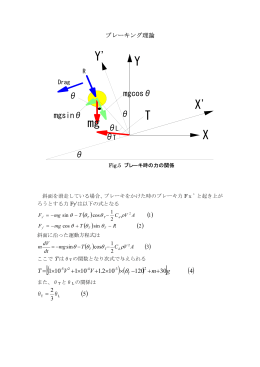
ブレーキング理論
オーサリング可能なシナリオ研究用ロボットのための パーツコントローラの
移動ロボットを用いた屋外における特定人物の捜索
水中ロボットにおけるフライホイール角運動量制御のための軌道計画手法
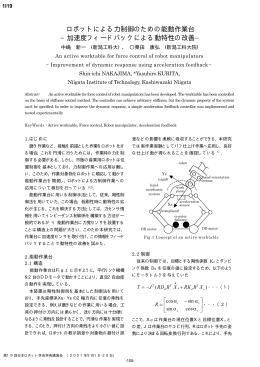
ロボットによる力制御のための能動作業台 −加速度フィードバックによる動
パラレルリンクロボットによる生産革新
ミメティックコミュニケーションと境界条件緩和法による ヒューマノイド
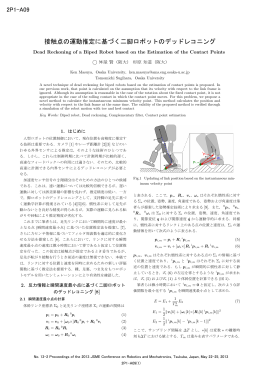
接触点の運動推定に基づく二脚ロボットのデッドレコニング 2P1-A09