Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ブレーキング理論
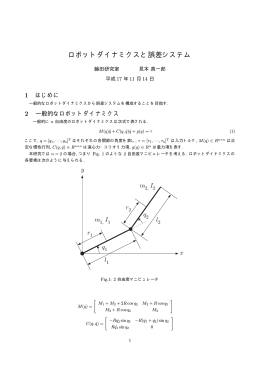
ロボットダイナミクスと誤差システム
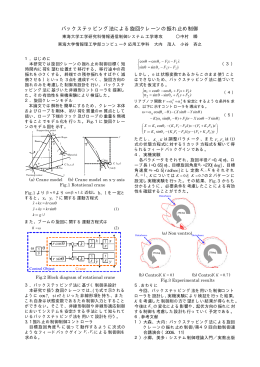
バックステッピング法による旋回クレーンの振れ止め制御
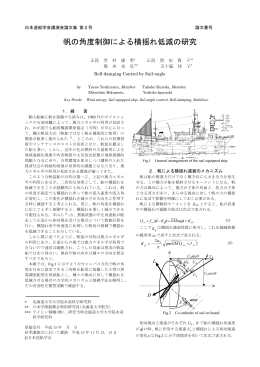
帆の角度制御による横揺れ低減の研究
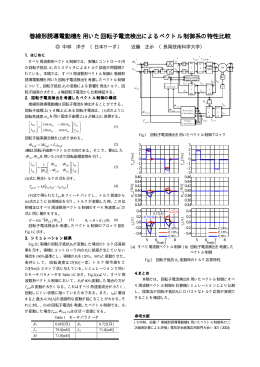
巻線形誘導電動機を用いた回転子電流検出による
外力トルク
中性子と物質の相互作用†
PDF1050KB
カテーテルシミュレータの開発 - 生体力学シミュレーション研究プロジェクト
マニピュレーションのための線状物体の動的変形解析
Document
技術資料ダウンロード
407 - 日本機械学会